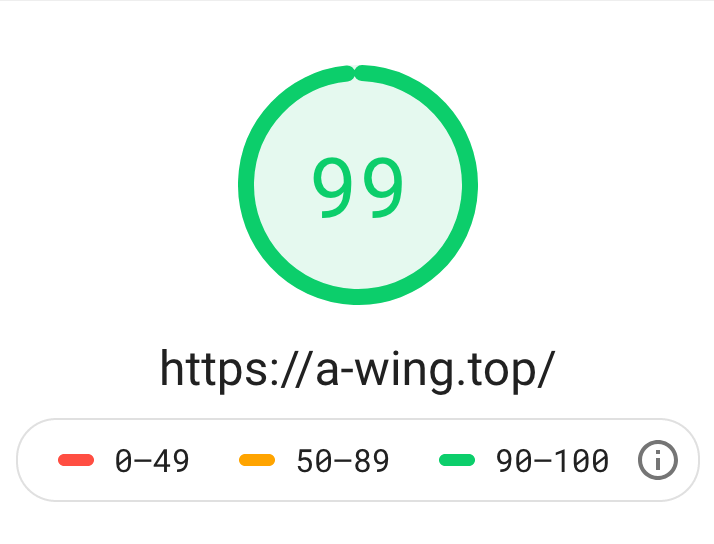
我的博客换新地址了!!!a-wing.top
我的博客换新地址了
从代号博客改成了飞天博客
上次网站该东西没时间整理,博客一直访问不了,好像一个月没发文章了。
该记录点东西了。。。
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 Hi! 上天不?!
相关推荐
2021-02-05
博客优化记录
我又一次开始优化 Blog,失业之后第一件事就是优化 Blog 。可算是有时间了 仍然没有换框架和主题(缝缝补补还可以再用几年 服务器备案号被撤销,我不得不从 upyun 上爬了出来 爬爬爬,我最会爬了 这回我整体都迁移到了 vercel 上。vercel 真好用(vercel 打钱 域名也交给国外的 dns 解析(aliyun 垃圾 友链也改了下规则站点挂了就删除太绝情了。所以决定链接去掉,只留个名字 优化PageSpeed Insights 可以用这个 pagespeed/insights Lighthouse Lighthouse 是一个开源的自动化工具,用于改进网络应用的质量 vercel 有 Lighthouse 集成 最上方的图片把 Banner 的图片去掉了,主要问题是应该固定高度,不然会有 Cumulative Layout Shift (CLS) 是的,加载中会发生页面偏移,首次渲染时并不知道图片尺寸,(先把高和宽当作 0px 处理) 等到图片加载完成,会引发重排(Reflow) 这样产生的视觉效果就是页面发生偏移,虽然可以在 css...
2021-02-12
创新者异闻录(1/7)——多旋翼无人机历史与大疆
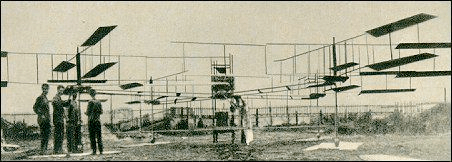
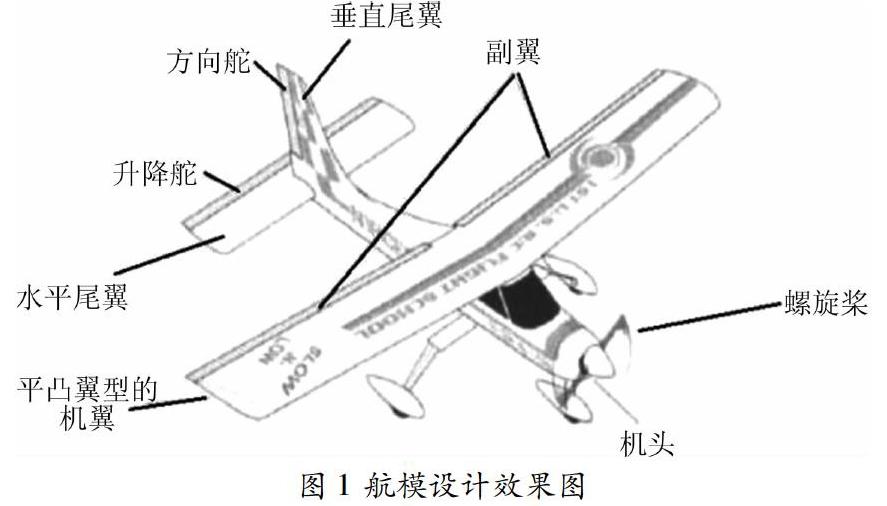
特殊声明:本篇文章不保证内容真实性,有些事情是业内口口相传的,不排除有人故意黑别人,使用资料来源也无法确保真实性,大家看了乐就好了,请研究无人机历史的不要以这篇文章为准 早在 1907 年 Bregue 兄弟就进行了他们的旋翼式直升机的飞行试验 航模无人机旧时代各种无人机很早就有,不过属于航模,和遥控玩具车是一类东西 固定翼和直升机的航模也经常使用 固定翼和直升机可以通过纯机械就可以飞行 还有一部分是做军事用途的无人机,军工背景做无人机 这也也造成了无人机的两大派系:航模派(长三角,珠三角一带)和军工派(比如:零度,地址在东北或西北的无人机厂商) 还有一类是机器人派:比如大疆,极飞,零零无限 这几类思路有明显的区别: 航模派注意成本,卖配件的居多(那些玩具机就是他们做的) 军工派不注意成本,做那种超大的,靠关系销售 机器人派天天研究软件算法 **多旋翼崛起的主要原因是:**基于MEMS(Microelectromechanical...
2021-02-12
创新者异闻录(2/7)——多旋翼无人机原理
先来科普一点知识:科普 PWM 信号 PWM 的全称是脉冲宽度调制(Pulse-width modulation),是通过将有效的电信号分散成离散形式从而来降低电信号所传递的平均功率的一种方式 所以根据面积等效法则,可以通过对改变脉冲的时间宽度,来等效的获得所需要合成的相应幅值和频率的波形 想完整的讲清楚,这个有点复杂,请自行查阅资料吧 最简单通俗易懂的说就是:我有一个 5V 电源,我只能控制 “通” 和 “断” 两种状态,(0 和 1 两种状态),0V 或 5V。但我想要 2.5V 的电压,那就在单位时间内 50% 的时间是通电的,剩下 50% 的时间是断电的,这样就可以等效得到一个 2.5V 的电压,这就是 PWM 什么是无人机“无人机” 标准的说法应该是 “无人驾驶飞行器” 是属于无人驾驶的 “robotic (机器人)” 设备,可以远程或自动控制。 不同类型的无人机器人可用于空中、地面、海上和水下。 这些(更正式地)被称为 无人驾驶飞行器(UAV)Unmanned Aerial Vehicles 无人驾驶地面车辆(UGV)Unmanned Ground...

2021-02-12
创新者异闻录(3/7)——多旋翼无人机的组成基础
我假定大家都上过高中,让这篇文章让有高中基础就可以看懂,看完这篇文章,就可以自己造一架属于自己无人机了,本文稍微有点硬核,这篇大概是整个系列里面最难的一篇 先科普一下 地面效应 当运动的飞行器距离地面(或水面)很近时,整个飞行器体的上下压力差增大,升力会陡然增加 还有就是地面效应时产生翼尖涡流导致的造成航空器的不稳定(起降时 pitch,roll 就很危险 ) 更通俗的说就是飞机在离地面很近时 (对于 F450 大概 0~1M...
2021-02-20
创新者异闻录(4/7)——多旋翼无人机的组成扩展
有很多零件对于多旋翼无人机来说,是可选的 科普 SDR 原理软件无线电,即 Software Defined Radio(SDR)通俗来讲,SDR 就是基于通用的硬件平台上用软件来实现各种通信模块。 由通用计算平台来处理信号,只要硬件支持这个频率就可以收发任何的信号,可以用这个来实现任何无线的通信 发送端: 接收端: 可以参考这篇: 软件无线电 SDR技术原理深入解析 USRP收发原理 全球导航卫星系统 Global Navigation Satellite System(GNSS)GPS 显然已经成了 GNSS 的代名词,很多人提及 GPS,就想到卫星导航,实质上这是对 GPS 的一个误解,同样也是对 GNSS 的混淆。GPS 是由美国国防部研制建立的一种具有全方位、全天候、全时段、高精度的卫星导航系统,能为全球用户提供低成本、高精度、有差别的 PNT(Positioning, Navigation and Timing) 服务 GPS 是美国的卫星导航系统,类似的还有中国的 BeiDou(北斗) ,欧盟的 Galileo (伽利略),俄罗斯的 GLONASS 印度的...

2021-02-21
创新者异闻录(5/7)——无人机自动机场
这篇文章有很多没法详细说的东西,需要想象力。想象这个东西是什么样子的(最好先看几集高达) 无人机航拍的作业流程 前一天,把电池充满电(锂电池的最佳保存电压不是满电) 去现场 拿出飞机 安装桨叶 校准磁罗盘 安装 SD 卡 启动遥控器 连接手机 启动飞机 起飞前检查,等待 GNSS 信号 起飞 作业(切换模式:飞个固定航线) 降落 拔出 SD 卡 下载数据 回去处理数据 这是一个固定的流程,每次使用都要重复。或许可以使用一个机器来完成这些动作 无人机自动机场的开始:airobotics 和 intel无人机自动机场的历史可以追溯到美国空军在 1968 年首次尝试使用地面状态下的 “盒子里的无人机” 技术。解决面临高操作和维护成本。 随着近年来小型无人机商用无人机的发展。终于,出现了自动商用无人机解决方案。 2017 年 intel 的 Airobotics,是世界上第一个被授权在没有飞行员的情况下驾驶全自动无人机,允许超视距商用无人机 超视距飞行((BVLOS)Beyond Visual Line of Sight)...
评论