如何使用 shell(2/3)—— 新时代的 shell
新时代的 shell 改进的地方大体上分为两个部分:语法 和 交互 如何使用 shell(1/3)—— shell 兼容和历史 如何使用 shell(2/3)—— 新时代的 shell 如何使用 shell(3/3)—— 配置 zsh Fish (Friendly Interactive shell)这是一个划时代的 shell ,开创了全新 shell 用户交互的体验。语法高亮,根据 manpage 来自动补全,自动建议都是它的首创 2B 青年用 bash,普通青年用 zsh,文艺青年用 fish。 fish 的默认配置是真的好用,配置文件是: ~/.config/fish/config.fish fish 通过函数来设置行为: fish 完全使用函数定制行为,你可以通过添加一些特殊的函数定制 fish 的行为,例如 prompt,fish 没有 PS1 这类特殊变量,而是使用函数。 语法高亮,自动建议 # 语法高亮 grep # 路径建议 cat /bin/hostname # 参数建议 grep...
如何使用 shell(1/3)—— shell 兼容和历史
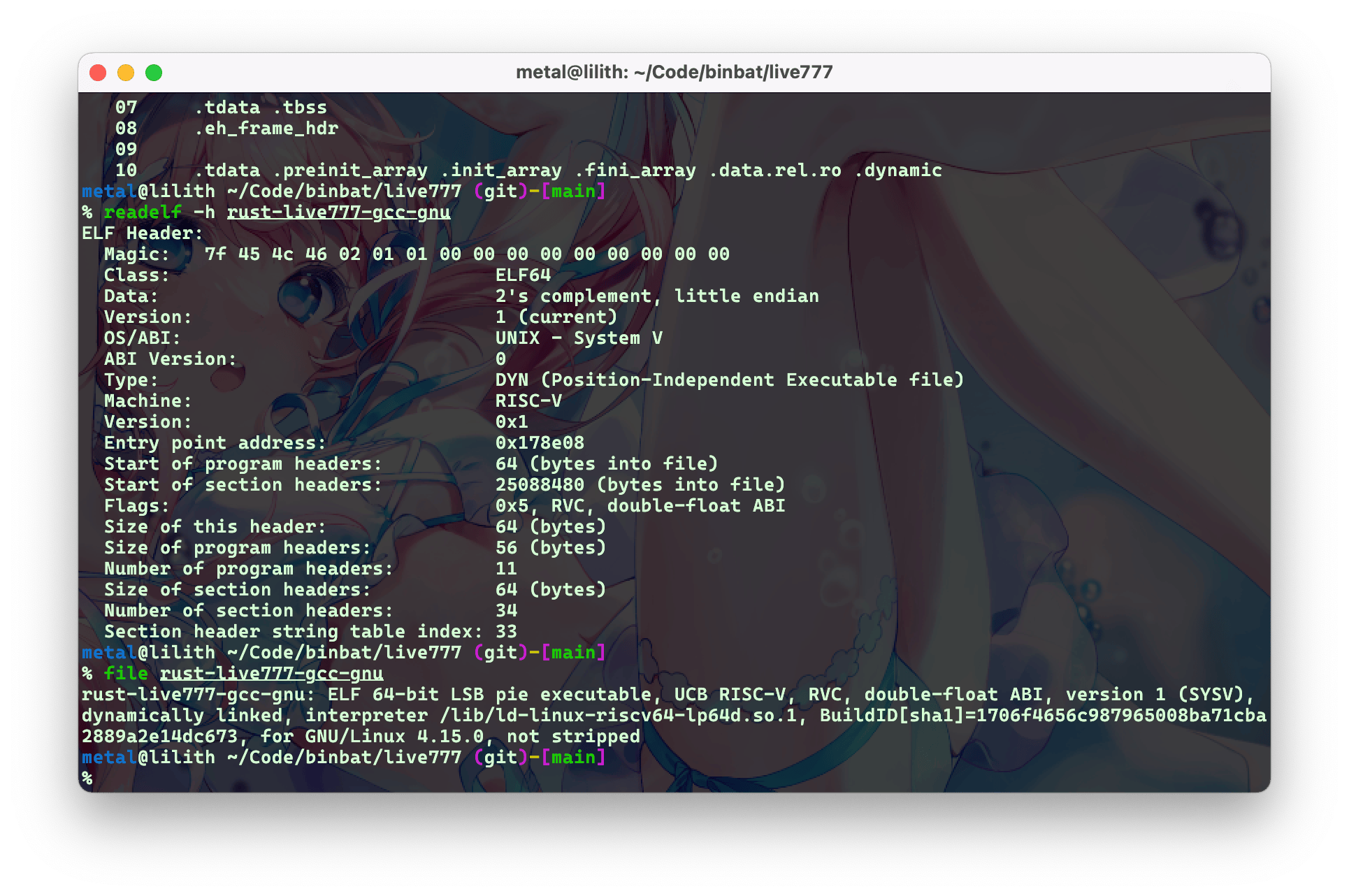
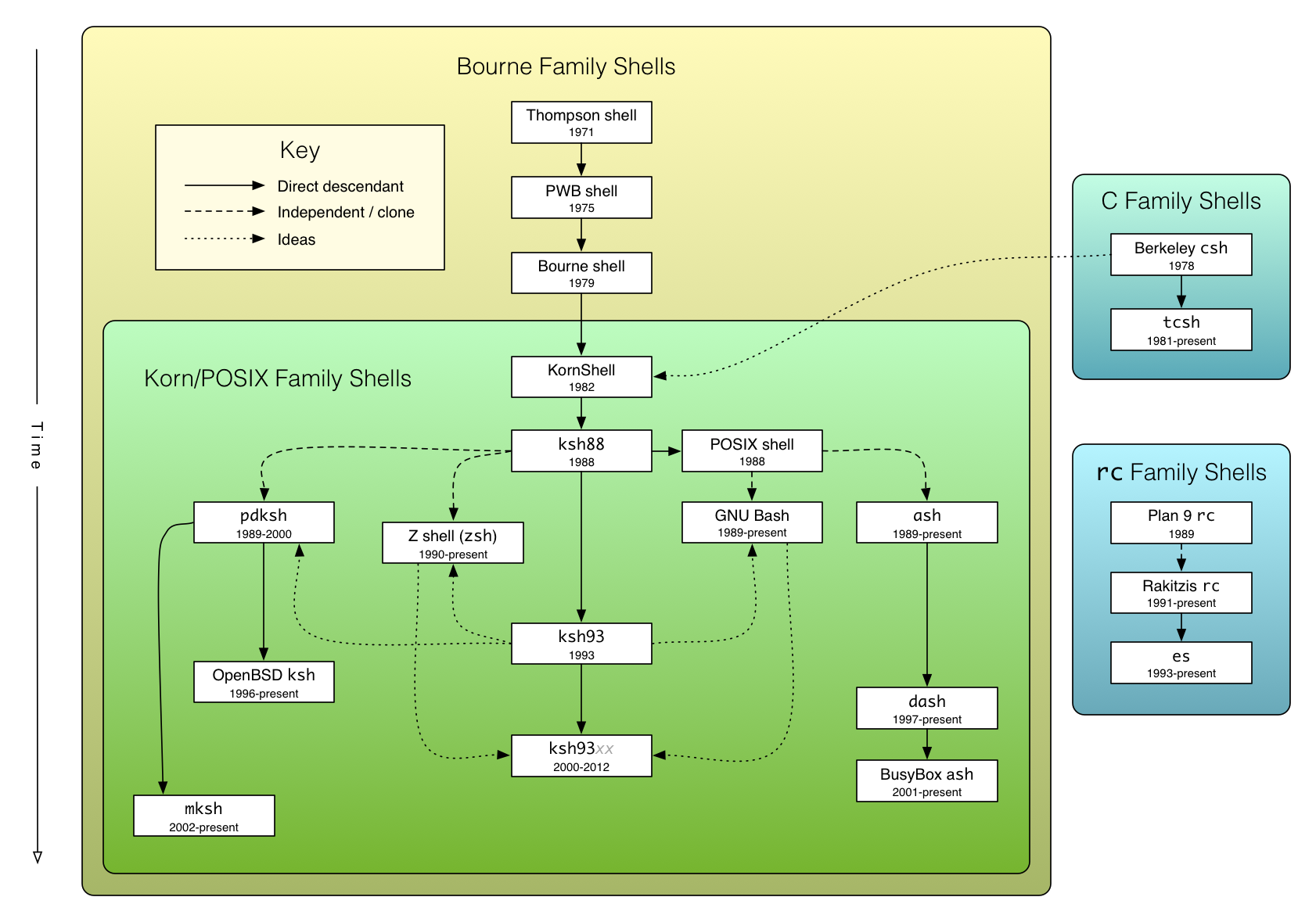
shell 的名字和概念是从 Unix 的前身 Multics 发展过来的。应用程序通过 shell 来进行调用并被系统执行。 一般的 sh 指的是 bsh (Bourne shell),但 Bourne shell 并不是 bash。bash 是 Bourne Again Shell 如何使用 shell(1/3)—— shell 兼容和历史 如何使用 shell(2/3)—— 新时代的 shell 如何使用 shell(3/3)—— 配置 zsh Thompson shellThompson shell(即 V6 Shell)是历史上第一个 Unix shell,1971 年由 Ken Thompson 写作出第一版并加入 UNIX 之中。它是一个简单的命令行解释器,但不能被用来运行 Shell script 。它的许多特征影响了以后命令行界面的发展。至 Unix V7 之后,被 Bourne shell 取代。 当时关键字还只有 if and goto 两种 管道和重定向就是那个时候做出来的 1234# 管道command1 |...

2020 年的总结
1565 年,法国国王查理九世颁布法令改以1月1日为一年的开端,改变了过去以4月1日为新年的传统。一些守旧派反对该改革,依然按照旧历法在新历4月1日送新年礼,庆祝新年。支持新年改革的人借此对守旧派大加嘲弄,在当天给他们送假礼物,邀请他们参加假聚会。从此在4月1日捉弄人的习惯便流传开来。当有人上当受骗的时候,捉弄他的人就会高呼 “Poisson d’avril(四月恶作剧)”。 顺便把 2019 年的总结也做了。反正没有发生什么。我就是觉得我改写个总结了。总是在忙 四月做总结好像不太合理。时间顺序感觉不太好) 生活2019 年初猫丢了这大概是不幸的开端了,虽说 24 岁有逆流。。。这年过的真是惨。不喜欢卖惨,就少讲点 肝生病肝生病,就是平时太肝的结果。(不过还好:肝,是人体唯一一个可以再生的器官) 生病了,灰色的生活。每一天都是灰色的,我觉得我已经命不久矣。我需要做一些什么,不然以后我的墓志铭上就只能空空如也 我几乎不生病,我一生病就吃很多的东西,很快就好了。。。但是这次我不能吃东西了 每天最开心的事就是下班之后看吃播,这个妹子吃了好多东西啊。好几人份 KFC 啊。b站...

干活向的 vim 配置
2021 年该用什么样的配置 极简,高效。这是实际干活用的,不需要太多插件和功能 这个配置是我用了三年多的 vim 不断改进的,实用主义 常年不用的插件都被我移除了 还有一个问题是我经常在不同的编程语言之间反复横跳,所以不依赖特定语言或框架的配置 我平时工作是就是这样来使用的,我一般都是在 tmux 跑 vim vim 基础版本vi 最老的版本。后来有了 Vim。可使用 vi 模式 近几年重写的版本 nvim (NeoVim)。nvim 最重要的功能就是支持了异步。后来 vim8 也支持了异步,已经没有什么区别了 带 GUI 的版本 GVim(GTK 的图形前端) MacOS 的专属 UI 版本 MacVim 一个配置发布版本 SpaceVim,模仿 SpaceEmacs 模式vim 有很多模式,最常用的就这三个模式:通常模式(Normal mode),插入模式(Insert mode),可视模式(Visual mode)。 EX 模式,可以当做没有,不小心进入了知道如何退出就够了。Ctrl + v 进入块选择模式,不知道也无所谓 Q 进入 EX 模式,输入 visual...
创新者异闻录(7/7)——失败者
我现在是失败者,但我不会一直都是失败者 本篇是个人感悟,无技术性内容。本系列文章感谢我前司草莓的同事,原大疆的工程师,原零度的工程师,和推友群友提出的宝贵意见和指导我不懂的问题。我知识水平有限,只能去求助各路大佬 关于本系列总计七篇文章:(原计划:初一到初七每天更一篇,这根本就不可能,可算是在二月份更完了) 第 1 篇 讲一下历史,随便水水 第 2~4 篇 讲一下我这几年学的绝技:徒手造飞机 第 2 篇 科普飞行器原理 第 3 篇 造一个最基础的飞行器 第 4 篇 飞行器的扩展 第 5~6 篇 讲我前司和我都干了什么 第 5 篇 无人机自动机场 (这个是个硬件,机械设备) 第 6 篇 无人机自动系统 (这个是个软件,管理控制系统) 第 7 篇 谈谈感悟 这个系列是否泄漏了前司机密?这里 用的所有资料全部都是公开资料 看第五篇那个图的文字(文字是不匹配),虽然我可以去找前同事拿一个更好的版本。但是我要说 用的所有资料全部都是公开资料 我怕有人看这个系列看不懂,所以抓了推友和群友帮我 Review。还是 Xuanwo...
创新者异闻录(6/7)——无人机自动系统
本文是我在无人机的 IoT 应用架构(给机器人连上网线)上所做的尝试,在小规模场景下表现不错。大规模并没有机会测试,请谨慎参考 这个东西我也不知道有什么用,或许未来有用,留给若干年后做相同东西的人做参考吧 无人机自动系统这个名字是我自己刚取的,原本做这个时,不叫这个名字。我觉得这个名字更贴切一些 这是一个很新的东西,没人知道他是什么,该怎么做。近几年才有人提出无人机,无人机自动机场,无人机系统放在一起全自动飞行的概念 最常见的说法是无人机管理系统。第一反应肯定是类似 CMS/ERP 一类的管理系统,当然首推以 Ruby on Rails 为首的管理系统思路。 但事实上并不是这样,管理系统要有在异常状态下可以接管无人机的能力。要可以实时控制无人机,实时显示各种状态,无人机本身是一个复杂的系统,并且要高度追求稳定性,任何一点微小的错误都可能带来致命的后果,代码里有一个 BUG...

创新者异闻录(5/7)——无人机自动机场
这篇文章有很多没法详细说的东西,需要想象力。想象这个东西是什么样子的(最好先看几集高达) 无人机航拍的作业流程 前一天,把电池充满电(锂电池的最佳保存电压不是满电) 去现场 拿出飞机 安装桨叶 校准磁罗盘 安装 SD 卡 启动遥控器 连接手机 启动飞机 起飞前检查,等待 GNSS 信号 起飞 作业(切换模式:飞个固定航线) 降落 拔出 SD 卡 下载数据 回去处理数据 这是一个固定的流程,每次使用都要重复。或许可以使用一个机器来完成这些动作 无人机自动机场的开始:airobotics 和 intel无人机自动机场的历史可以追溯到美国空军在 1968 年首次尝试使用地面状态下的 “盒子里的无人机” 技术。解决面临高操作和维护成本。 随着近年来小型无人机商用无人机的发展。终于,出现了自动商用无人机解决方案。 2017 年 intel 的 Airobotics,是世界上第一个被授权在没有飞行员的情况下驾驶全自动无人机,允许超视距商用无人机 超视距飞行((BVLOS)Beyond Visual Line of Sight)...
创新者异闻录(4/7)——多旋翼无人机的组成扩展
有很多零件对于多旋翼无人机来说,是可选的 科普 SDR 原理软件无线电,即 Software Defined Radio(SDR)通俗来讲,SDR 就是基于通用的硬件平台上用软件来实现各种通信模块。 由通用计算平台来处理信号,只要硬件支持这个频率就可以收发任何的信号,可以用这个来实现任何无线的通信 发送端: 接收端: 可以参考这篇: 软件无线电 SDR技术原理深入解析 USRP收发原理 全球导航卫星系统 Global Navigation Satellite System(GNSS)GPS 显然已经成了 GNSS 的代名词,很多人提及 GPS,就想到卫星导航,实质上这是对 GPS 的一个误解,同样也是对 GNSS 的混淆。GPS 是由美国国防部研制建立的一种具有全方位、全天候、全时段、高精度的卫星导航系统,能为全球用户提供低成本、高精度、有差别的 PNT(Positioning, Navigation and Timing) 服务 GPS 是美国的卫星导航系统,类似的还有中国的 BeiDou(北斗) ,欧盟的 Galileo (伽利略),俄罗斯的 GLONASS 印度的...

创新者异闻录(3/7)——多旋翼无人机的组成基础
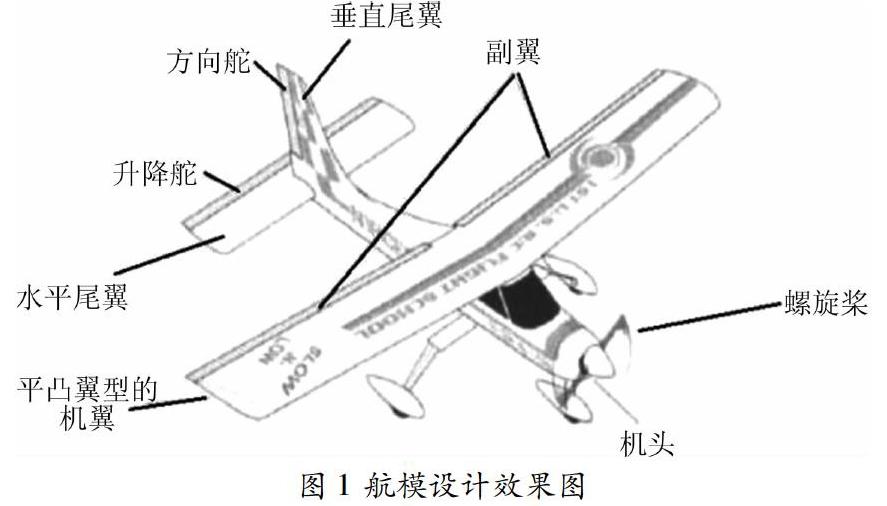
我假定大家都上过高中,让这篇文章让有高中基础就可以看懂,看完这篇文章,就可以自己造一架属于自己无人机了,本文稍微有点硬核,这篇大概是整个系列里面最难的一篇 先科普一下 地面效应 当运动的飞行器距离地面(或水面)很近时,整个飞行器体的上下压力差增大,升力会陡然增加 还有就是地面效应时产生翼尖涡流导致的造成航空器的不稳定(起降时 pitch,roll 就很危险 ) 更通俗的说就是飞机在离地面很近时 (对于 F450 大概 0~1M...
创新者异闻录(2/7)——多旋翼无人机原理
先来科普一点知识:科普 PWM 信号 PWM 的全称是脉冲宽度调制(Pulse-width modulation),是通过将有效的电信号分散成离散形式从而来降低电信号所传递的平均功率的一种方式 所以根据面积等效法则,可以通过对改变脉冲的时间宽度,来等效的获得所需要合成的相应幅值和频率的波形 想完整的讲清楚,这个有点复杂,请自行查阅资料吧 最简单通俗易懂的说就是:我有一个 5V 电源,我只能控制 “通” 和 “断” 两种状态,(0 和 1 两种状态),0V 或 5V。但我想要 2.5V 的电压,那就在单位时间内 50% 的时间是通电的,剩下 50% 的时间是断电的,这样就可以等效得到一个 2.5V 的电压,这就是 PWM 什么是无人机“无人机” 标准的说法应该是 “无人驾驶飞行器” 是属于无人驾驶的 “robotic (机器人)” 设备,可以远程或自动控制。 不同类型的无人机器人可用于空中、地面、海上和水下。 这些(更正式地)被称为 无人驾驶飞行器(UAV)Unmanned Aerial Vehicles 无人驾驶地面车辆(UGV)Unmanned Ground...